The rotation model provides exactly one distance R from the galactic centre for every longitude l and line of sight velocity v.
In the outer galaxy, R can be converted to a unique map location (shown as the light green dot in the diagram at the right). In the inner galaxy, R can be converted to two distinct locations (the near and far distances - shown as blue and red dots on the right).
When we use velocity data to create a model of the inner galaxy, therefore, we are forced to choose between two possible near and far positions for each longitude and velocity value. This choice is called the kinematic distance ambiguity. When we create a model we are at the same time creating an antimodel consisting of the distance options not selected for the model.
There is no way to choose between model and antimodel (or some combination of the two) using the velocity data alone. Some other distance technique (ideally parallax but also photometric or other techniques) must be used to make this choice.
As parallax measurements are not available for much of the inner galaxy and other distance techniques are unreliable, it is useful to present both model and antimodel in case the wrong option has been chosen.
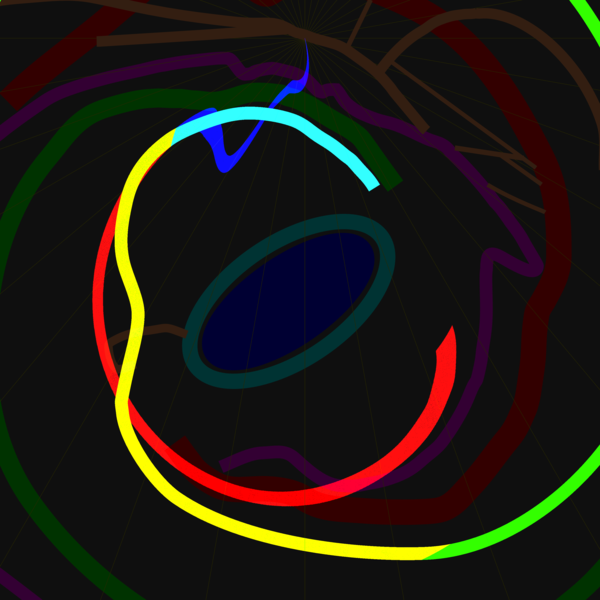
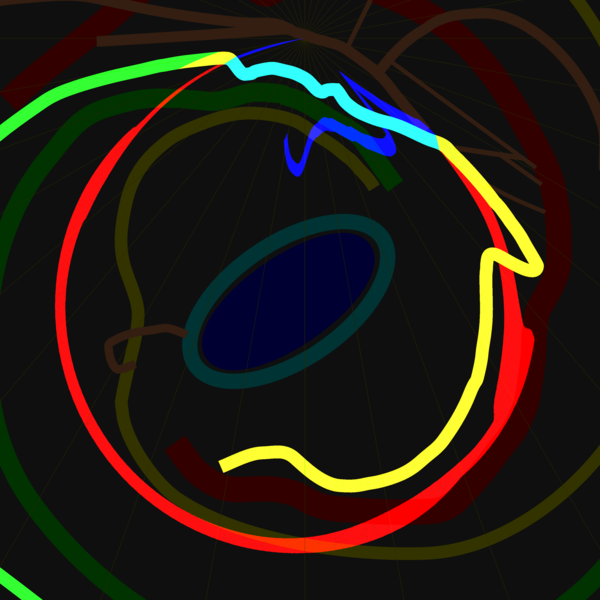
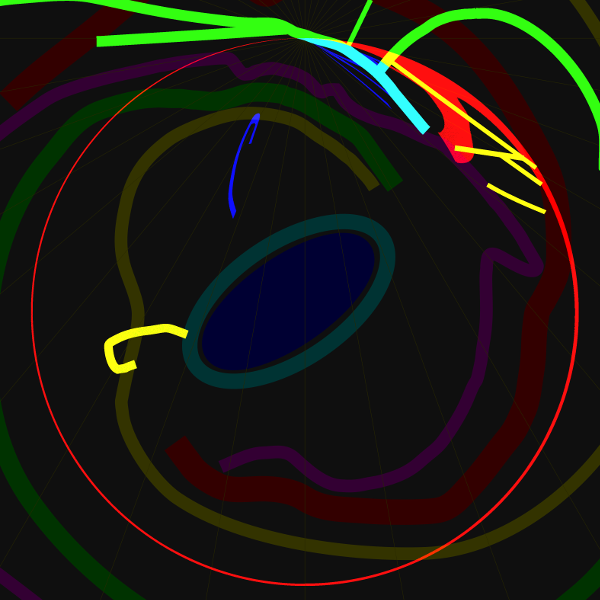
The images below show the near and far options for both the model and antimodel in the inner galaxy.